Body tracking and gesture recognition
- Launch
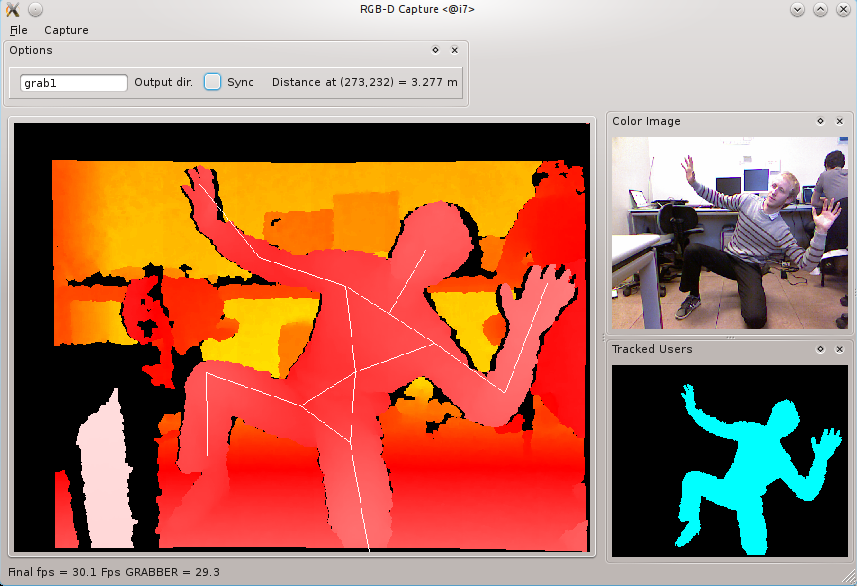
rgbd-skeletor.
If you make the calibration pose, you should be able to see your joints. If you are interested into a minimal body tracking example, you can have a look at nestk/tests/test-nite.cpp. Enable the NESTK_BUILD_TESTS cmake variable to compile it.