
Demo software to visualize, calibrate and process Kinect cameras output
NOTE: RGBDemo is not actively maintained anymore.
RGBDemo is an opensource software that aims at providing a simple toolkit to start playing with Kinect data and develop standalone computer vision programs without the hassle of integrating existing libraries. The project is divided in a library called nestk and some demo programs using it. You can get more information on using the library in your programs on the Nestk page.
Current demos include:
- Grab kinect images and visualize / replay them
- Calibrate the camera to get point clouds in metric space
- Extract skeleton data / hand point position
- Multiple Kinect support and calibration
- Demo of 3D scene reconstruction using a freehand Kinect
- Demo of object model acquisition with markers
- Demo of people detection and localization
- Demo of 3D model estimation of objects lying on a table
News: PMD Nano support!
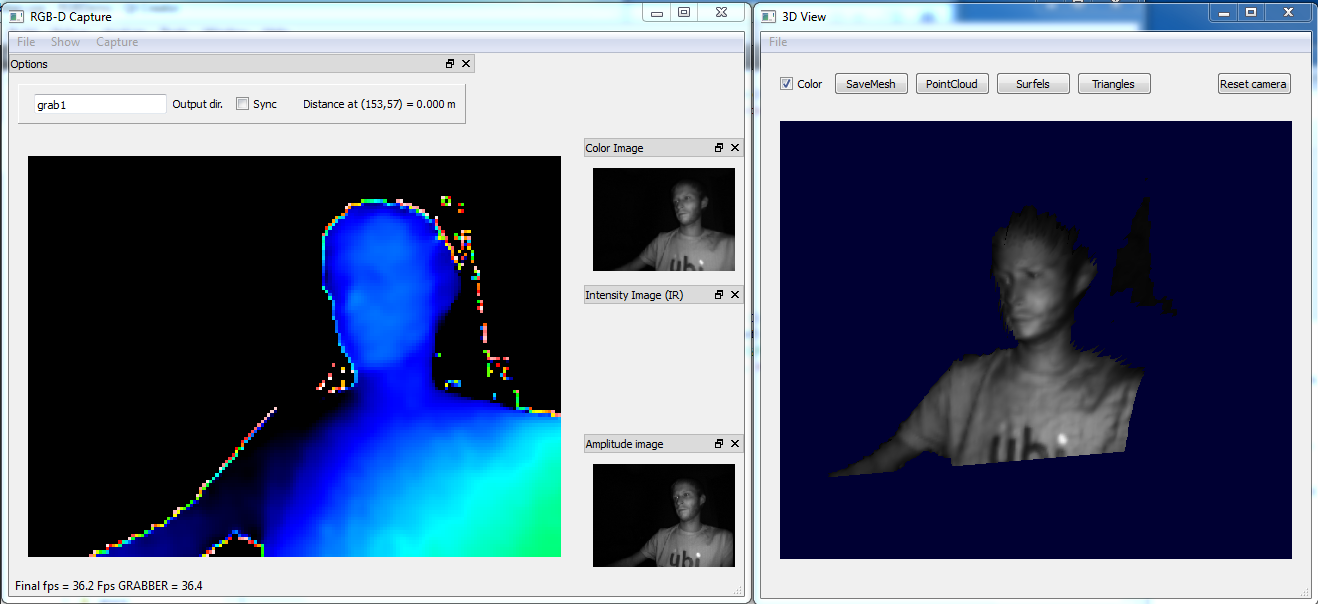
PMDTec was kind enough to let us play with a PMD Nano sensor, their most recent Time-of-Flight camera. While it still has some of the common limitations of ToF sensors, it is really tiny, supports very close ranges, and can reach framerates of up to 90 Hz. It is now supported in RGBDemo, check the tutorial if you want to give it a try!
News: RGBDemo 0.7.0 released!
New features since v0.6.1:
- New demo to acquire object models using markers
- Simple calibration mode for rgbd-multikinect
- Much faster grabbing in rgbd-multikinect
- Add timestamps and camera serials when saving to disk
- Compatibility with PCL 1.4
- Various bug fixes
News: RGBDemo 0.6.1 released!
New features since v0.5.0
- Various bug fixes
- Compatibility with OpenCV 2.3.1
- Cleanup viewer interface
- Experimental infrared support with OpenNI (still buggy)
- Camera/Projector calibration thanks to Mariano Tepper and Christian Parsons
- Grabbing and calibration of multiple Kinects
- Detection and modeling of objects lying on a table
- Better PCL integration
You can have a look at the new object detection demo on the following video: